Gerinim Dalga Dişlisi Nedir?
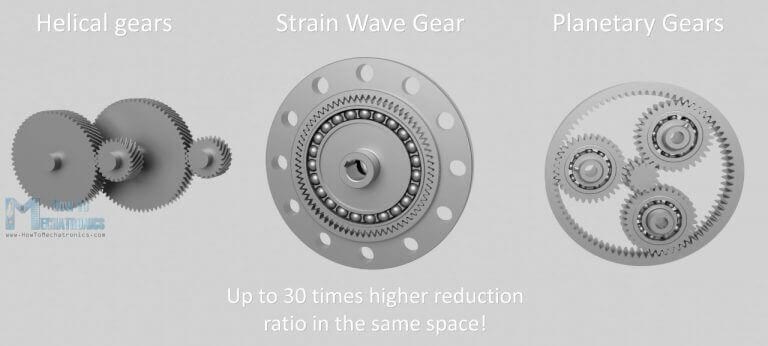
Strain Wave Gear, kompakt ve hafif bir pakette çok yüksek indirgeme oranına izin veren benzersiz bir mekanik dişli sistemi türüdür. Helisel dişliler veya planet dişliler gibi geleneksel dişli sistemleri ile karşılaştırıldığında, aynı alanda 30 kata kadar daha yüksek redüksiyon oranları elde edebilir. Buna ek olarak, sıfır boşluklu karakteristik, yüksek tork, doğruluk ve güvenilirliğe sahiptir. Bu nedenle, bu dişli sistemi robotik, havacılık, tıbbi makineler, freze makineleri, üretim ekipmanları ve benzeri birçok uygulamada kullanılmaktadı
Harmonik motor 1957'de C. Walton Musser tarafından icat edildi. İsmi Harmonic Drive şirketi tarafından markalandığı için bu isimdedir.
Nasıl Çalışır?
Pekala, şimdi nasıl çalıştığına bir göz atalım. Bir harmonik sürücü üç anahtar bileşene sahiptir: bir dalga üreteci, esnek bir spline ve dairesel bir spline.
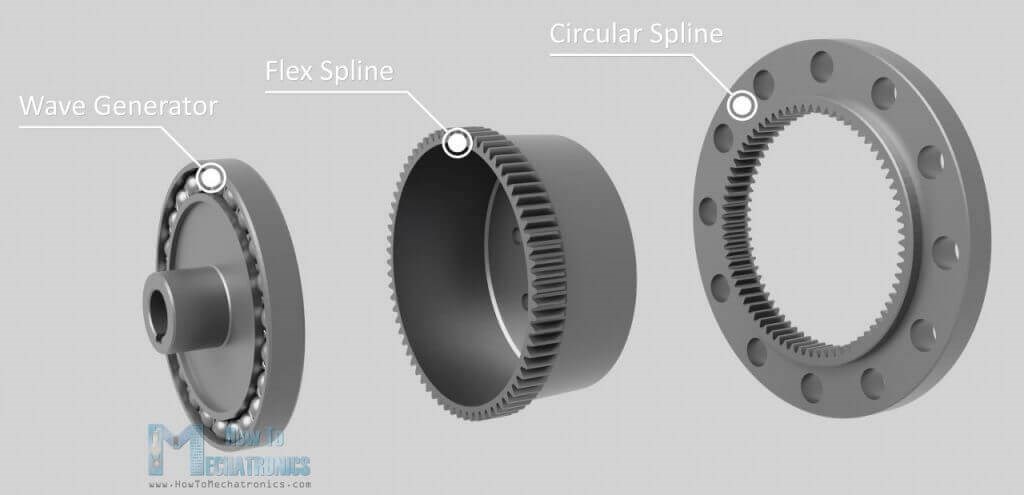
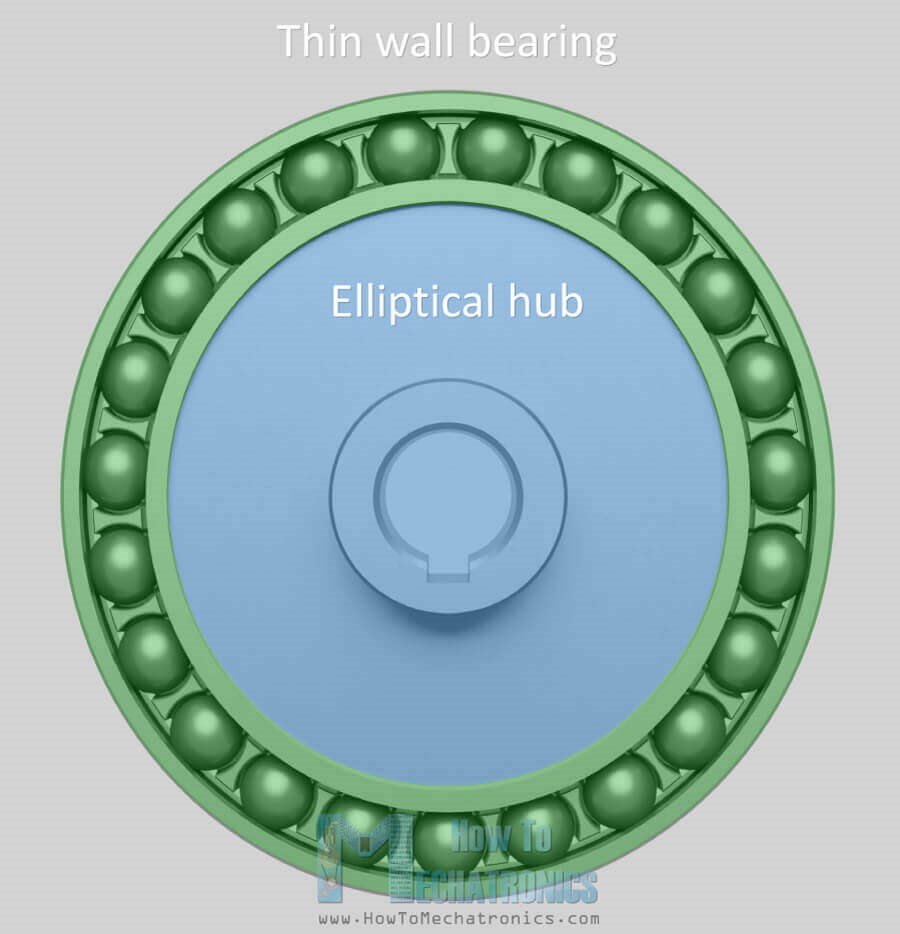
Dalga jeneratörü eliptik bir şekle sahiptir ve eliptik bir göbek ve göbeğin eliptik şeklini takip eden özel bir ince duvarlı rulmandan oluşur. Bu dişli setinin girişi motor miline bağlıdır.
Dalga üreteci döndükçe bir dalga hareketi oluşturur. Flex spline, silindirik bir kap formuna sahiptir ve esnektir. Ancak burulmaya karşı dayanıklı alaşımlı çelik malzemeden yapılmıştır. Kabın yanları çok incedir ancak tabanı kalın ve rijittir.
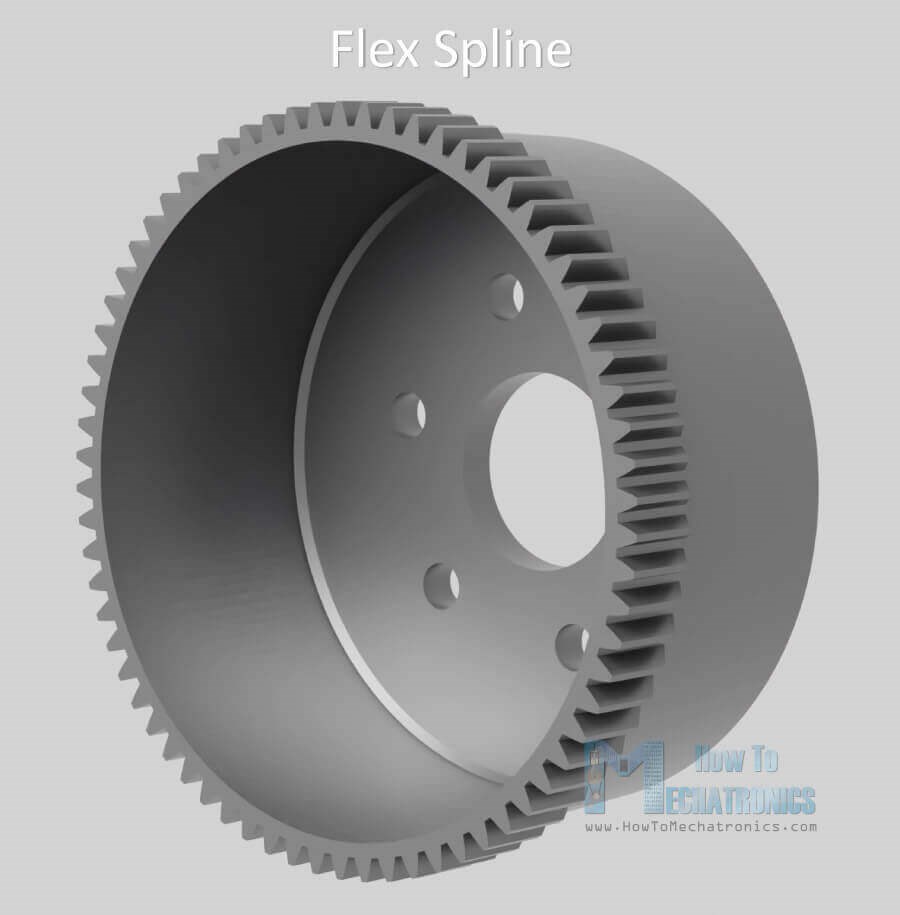
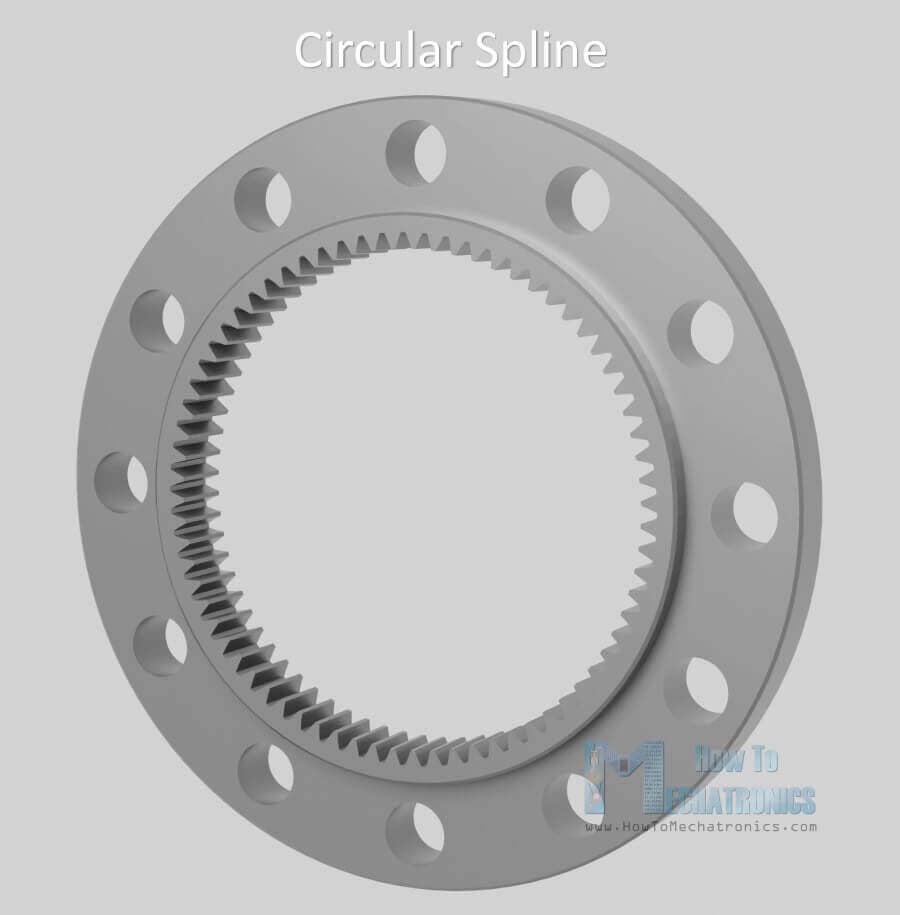
Bu, kabın açık ucunun esnek olmasına izin verir, ancak kapalı uç oldukça sert olur ve bu nedenle çıkış olarak kullanabilir ve çıkış flanşını buna bağlayabiliriz. Esnek spline, açık uçta dış dişlere sahiptir. Öte yandan, Dairesel spline içte dişleri olan sert bir halkadır. Dairesel spline, aslında gerinim dalga dişli sisteminin temel tasarımı olan esnek spline'dan iki dişe sahiptir.
Bu nedenle, dalga üretecini Flex spline'a yerleştirdiğimizde, flex spline dalga üretecinin şeklini alır.

Dalga jeneratörü döndükçe, esnek spline'ın açık ucunu radyal olarak deforme eder. Dalga jeneratörü ve esnek spline daha sonra dişleri birbirine bağlayan dairesel spline içine yerleştirilir.
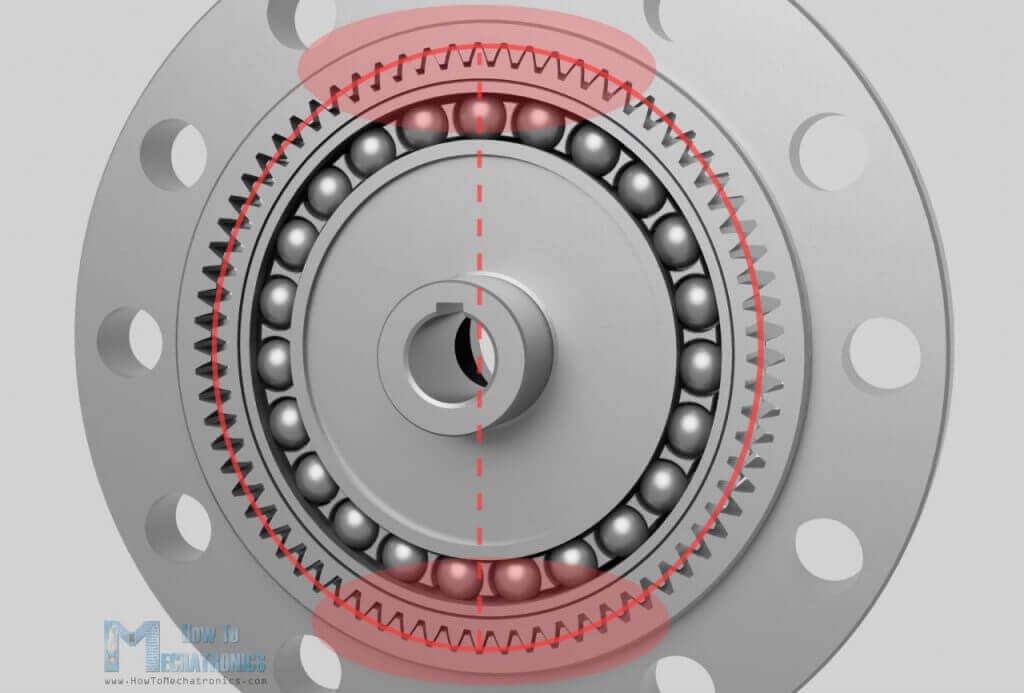
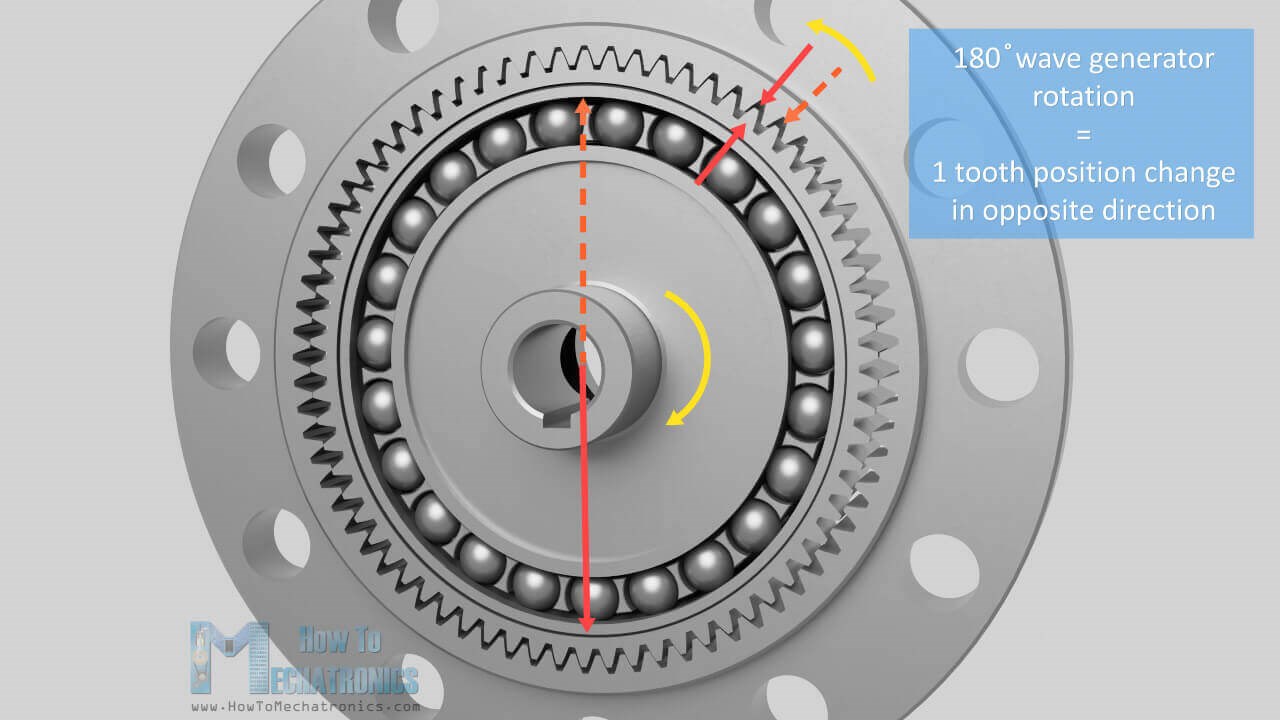
Esnek spline'ın eliptik şekli nedeniyle, dişler flex spline'ın sadece karşı tarafında iki bölgeye bağlanır ve bu Dalga Jeneratörü elipsin ana ekseni boyuncadır. Şimdi, dalga üreteci dönerken, dairesel spline ile birbirine bağlanan Flex spline dişleri yavaşça pozisyon değiştirecektir. Flex spline ve Dairesel spline arasındaki diş sayısı farkı nedeniyle, dalga jeneratörünün her 180 derece dönüşü için, dişlerin birbirine bağlanması esnek spline'ın dalga jeneratörüne göre küçük bir miktar geriye doğru dönmesine neden olacaktır. Diğer bir deyişle, dalga üretecinin her 180 derecelik dönüşüyle, dairesel yivli esnek yiv dişleri sadece bir diş ilerleyecektir.
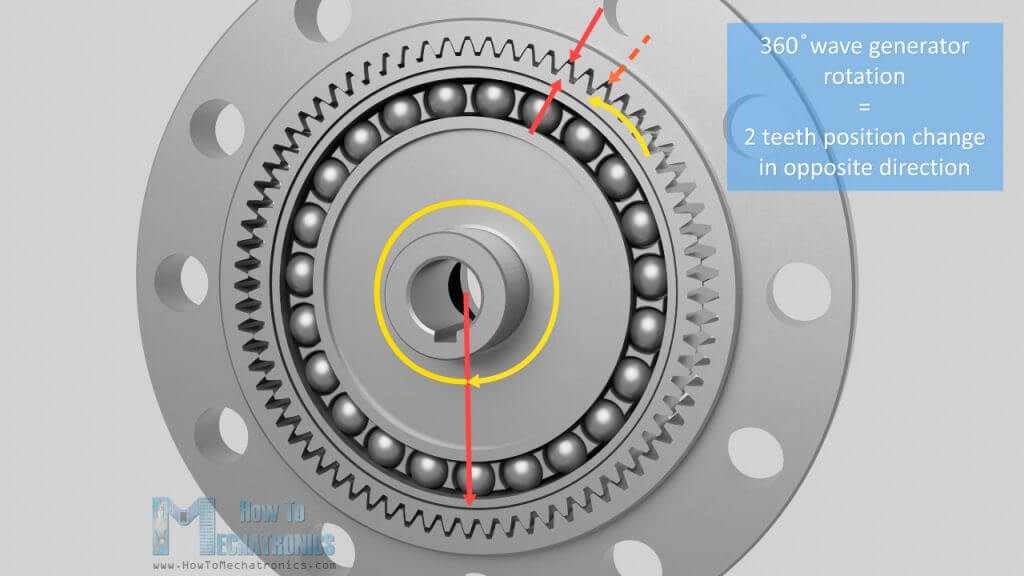
Böylece, dalga jeneratörünün 360 derecelik tam dönüşü için esnek spline pozisyon değiştirecek veya iki diş tarafından ilerleyecektir.
Örneğin, esnek spline 200 dişe sahipse, dalga üreticisinin flex spline'ın 200 dişe ilerlemesi için 100 devir yapması gerekir, ya da bu esnek spline için sadece tek bir dönüş olan 100: 1 oranıdır. İndirgeme oranını aşağıdaki formülle kolayca hesaplayabiliriz. Oran, esnek yiv dişlerine eşittir - dairesel yiv dişleri, esnek yiv dişlerine bölünür.
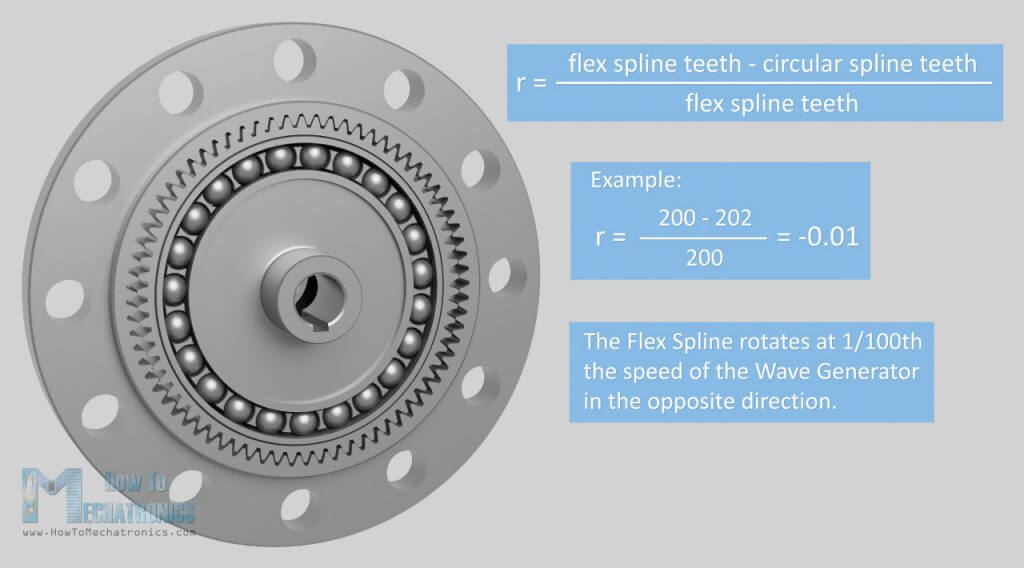
Dolayısıyla, esnek spline üzerinde 200 diş örneğinde, azalma oranı -0.01'dir. Bu dalga jeneratörünün hızının 1 / 100'ü ve eksi iç çekme, çıktının zıt yönde olduğunu gösterir. Sayı veya dişleri değiştirerek farklı redüksiyon oranları elde edebiliriz.
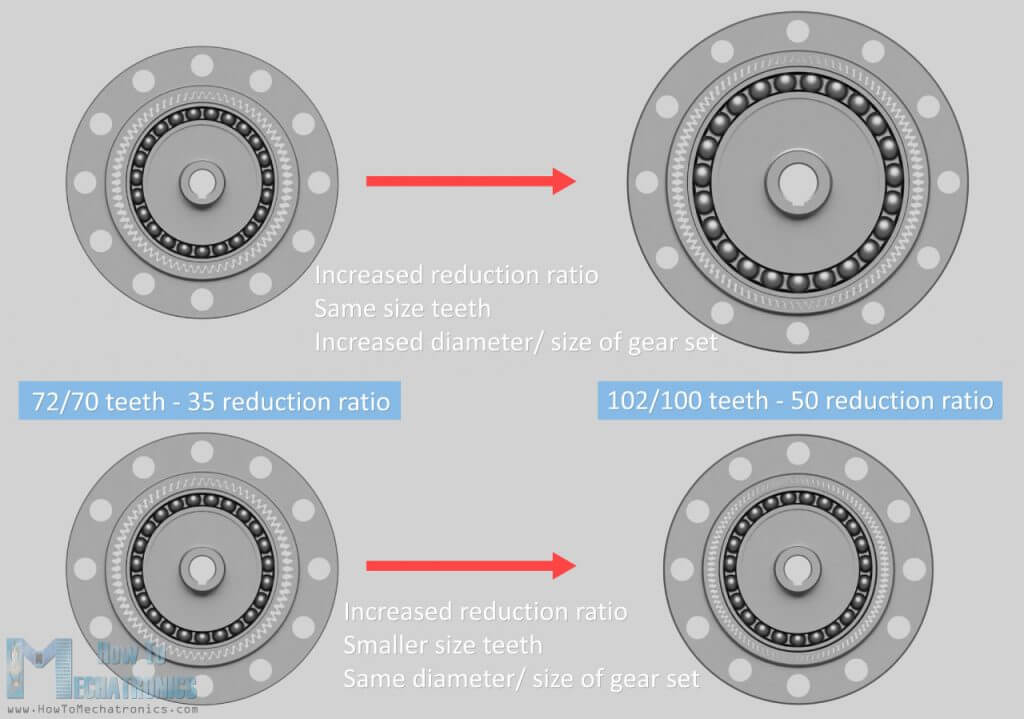
Bunu, aynı boyuttaki dişlere sahip mekanizma çapını değiştirerek veya dişli setinin boyutunu ve ağırlığını koruyan diş boyutunu değiştirerek başarabiliriz.
Gerilim Dalga Dişlisi - Harmonik Sürücü 3D Modeli
Şimdi Strain Wave Gear'ın arkasındaki teoriyi bildiğimize göre, 3D yazıcı kullanarak üretim aşamasını göstereyim.
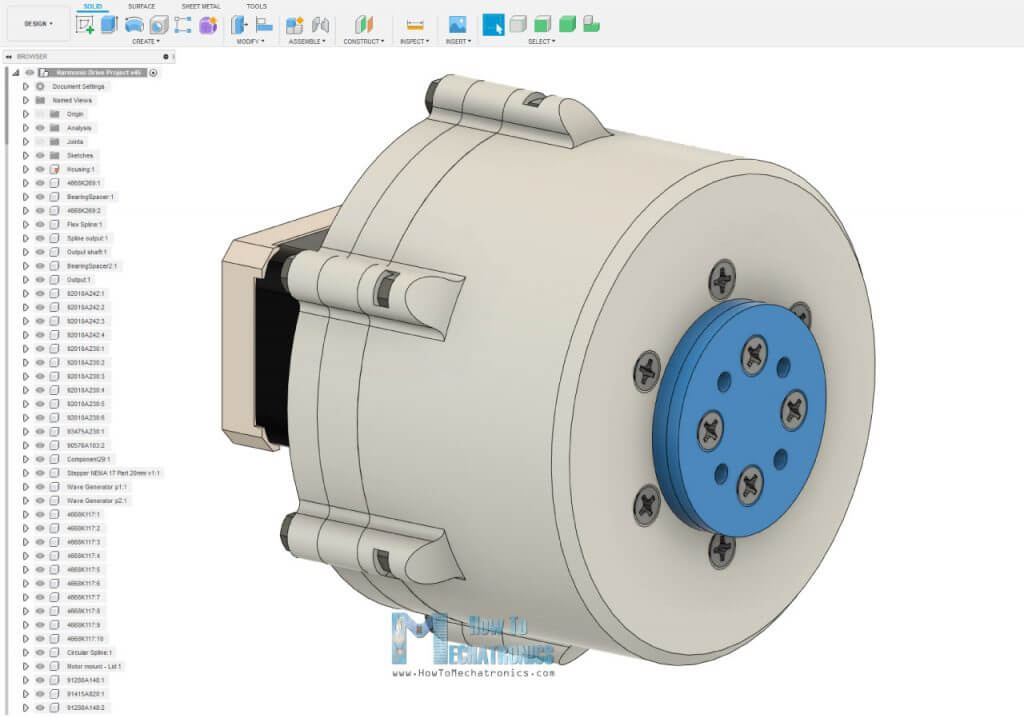
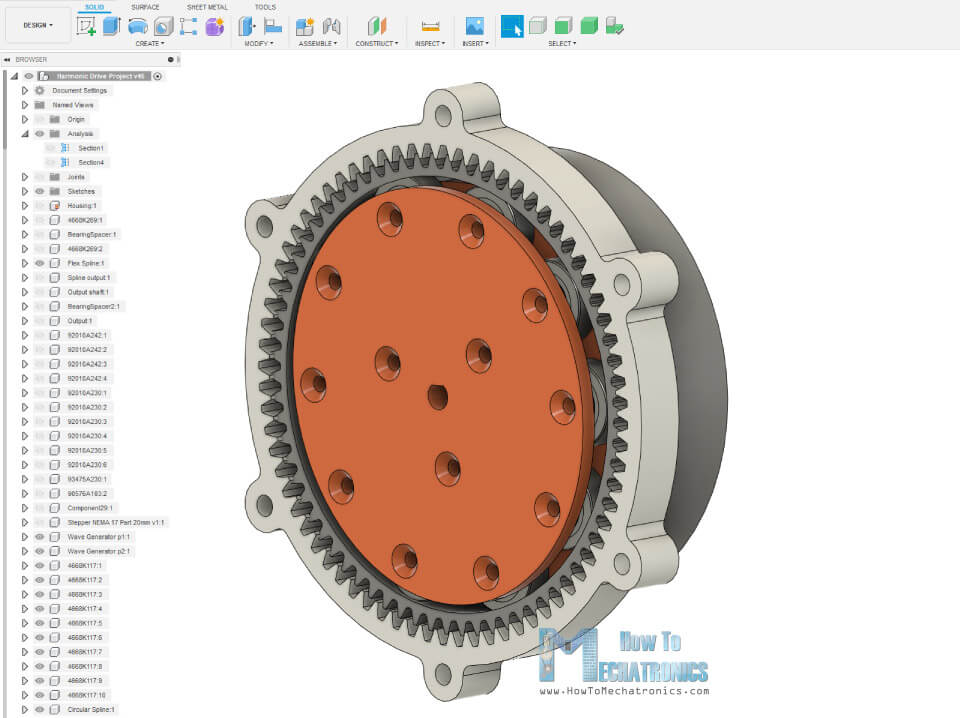
Bu Strain Wave Gear modelini Fusion 360 kullanarak tasarladım. Tüm bu parçalar 3D olarak basılabilir, bu yüzden montajı tamamlamak için sadece bazı cıvata ve somunlara ve bazı rulmanlara ihtiyacımız var. Giriş için bir NEMA 17 step motor kullanmayı tercih ettim.
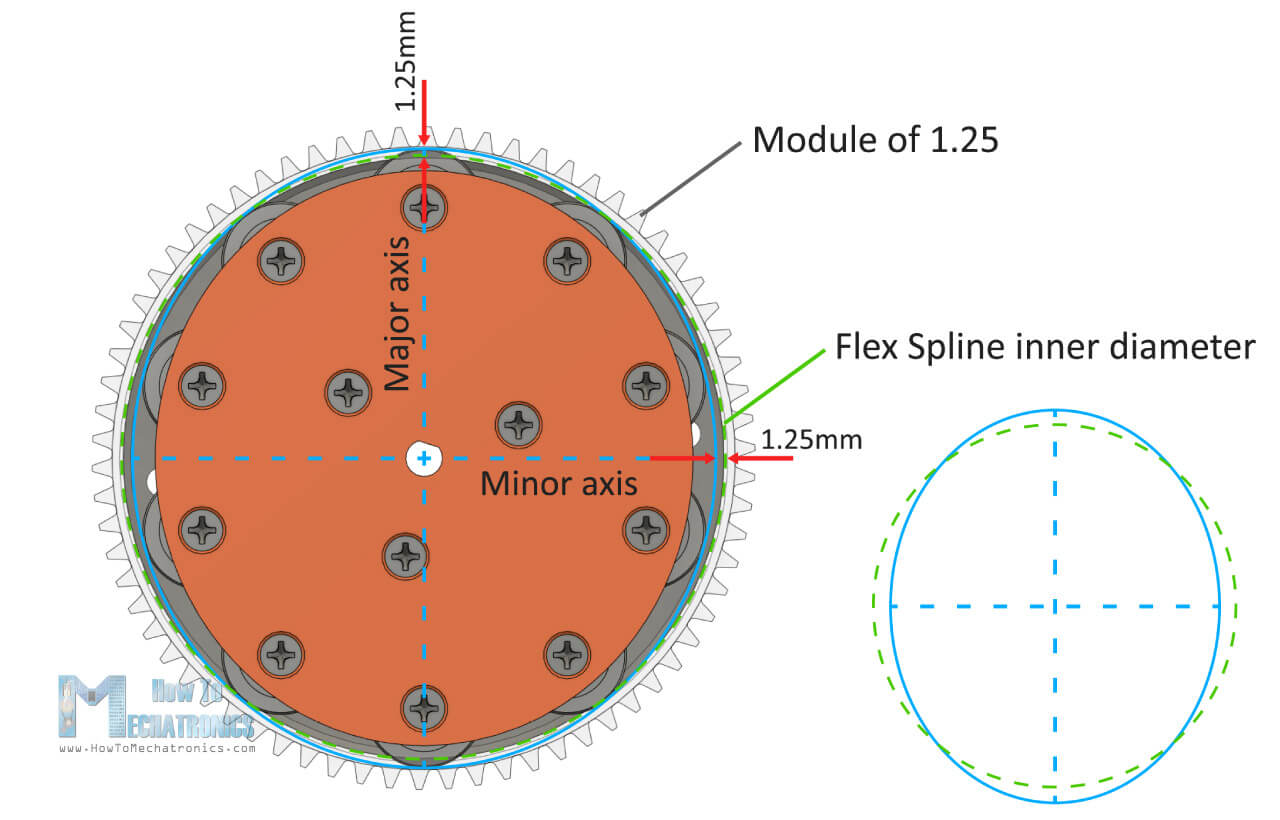
Strain Wave Gear, dairesel spline, flex spline ve dalga jeneratörünün 3 temel elemanını şöyle tasarladım. 3D yazıcıların ne kadar iyi, doğru ve hassas baskı yapabileceği konusunda kendi sınırlamaları olduğundan, ilk karar vereceğim dişlilerin modülü veya dişlerin ne kadar büyük veya küçük olacağıydı. Dairesel kama için 1,25 ve 72 dişli bir modül seçtim.
Elbette, esnek spline'ın 2 diş daha az olması gerekir (70 diş). Bu, dişli setinin nispeten küçük bir boyutuna sahipken 35: 1 oranıyla sonuçlanacaktır. Dalga jeneratörüne gelince, bulmak kolay olmadığı için daha önce belirtilen özel tip ince duvarlı rulmanları kullanamayız. Bunun yerine, elips çevresine yerleştirilmiş normal bilyalı rulmanlar kullanacağız. Elipsin boyutları esnek yivin iç duvarının boyutlarına göre yapılmalıdır. Elipsin ana eksen yarıçapını esnek yivin iç duvarının yarıçapından 1.25mm daha büyük yaptım. Diğer yandan, elipsin küçük eksen yarıçapı 1,25 mm daha küçüktür.
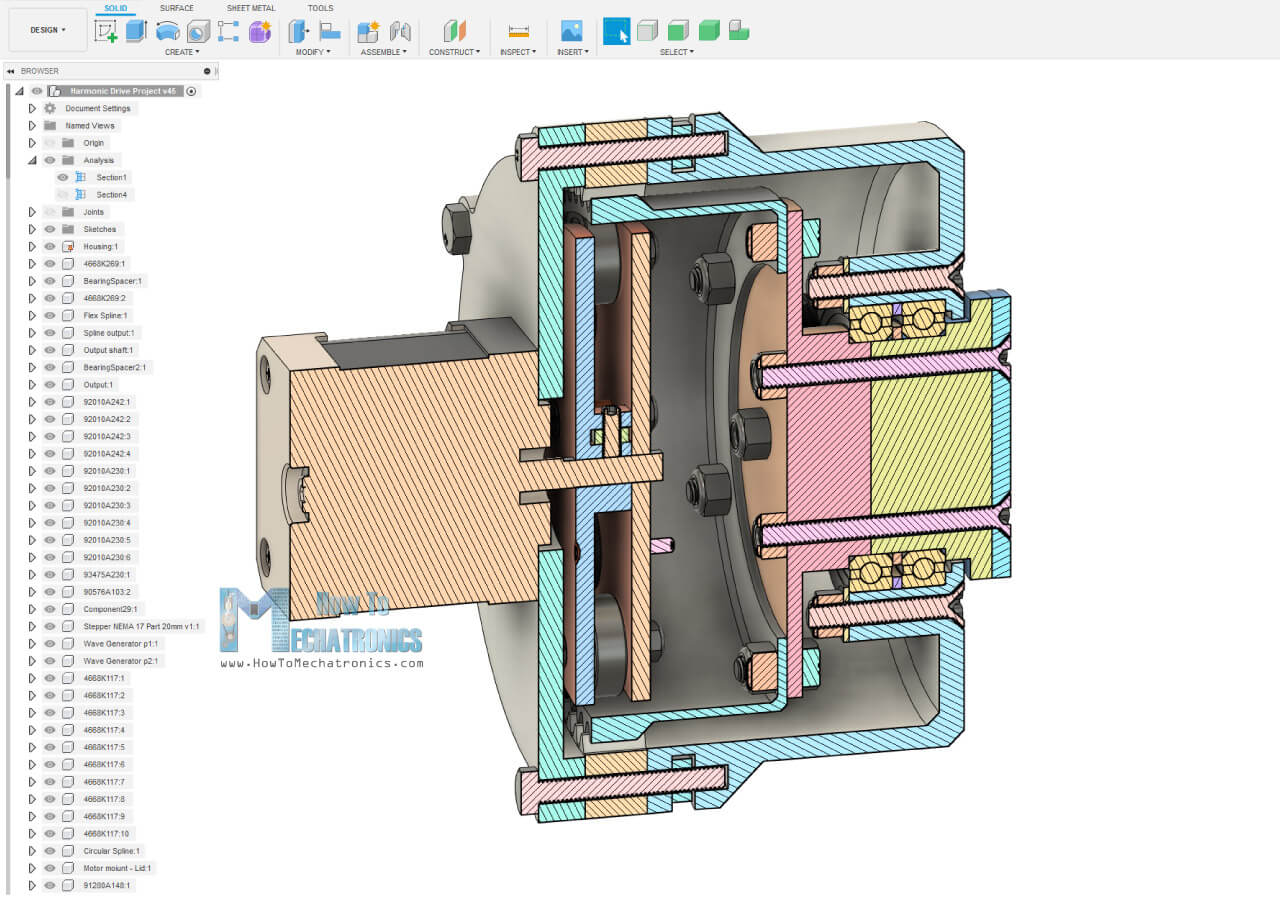
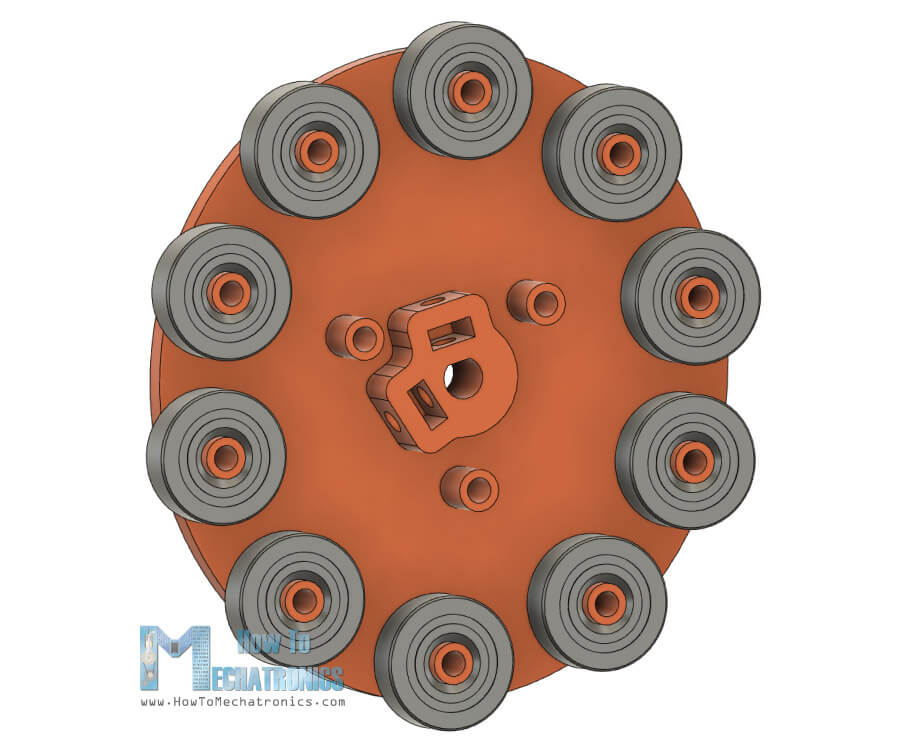
Dalga jeneratörü, 10 yatağın kolayca takılabileceği iki bölümden oluşacaktır. Bu bölümlerden birinde ayrıca NEMA 17 step motorunu sabitlemek için uygun bir şaft kaplini bulunur.
Parçaların geri kalanı bu 3 temel bileşen etrafında tasarlanmıştır. Muhafazanın çıkış tarafına 47 mm dış çapa sahip iki rulman yerleştireceğiz ve bazı cıvata ve somunların yardımıyla sabitleyeceğiz.
Çıkış flanşı, cıvata ve somunlarla bağlanan iki parçadan oluşur, böylece iki yatağa kolayca sabitleyebiliriz. 3D baskı için gereken 3D modeli ve STL dosyalarını aşağıdan indirebilirsiniz. STEP Dosyası (Fusion 360 ile açabilirsiniz):
3D Baskılı Gerinim Şanzımanı - Harmonik Tahrik
Tamam, şimdi parçaları 3D olarak basmanın zamanı geldi. Dişlileri 3D yazdırırken, dilimleme yazılımınızda Yatay Genişletme özelliğini kullanmak önemlidir.
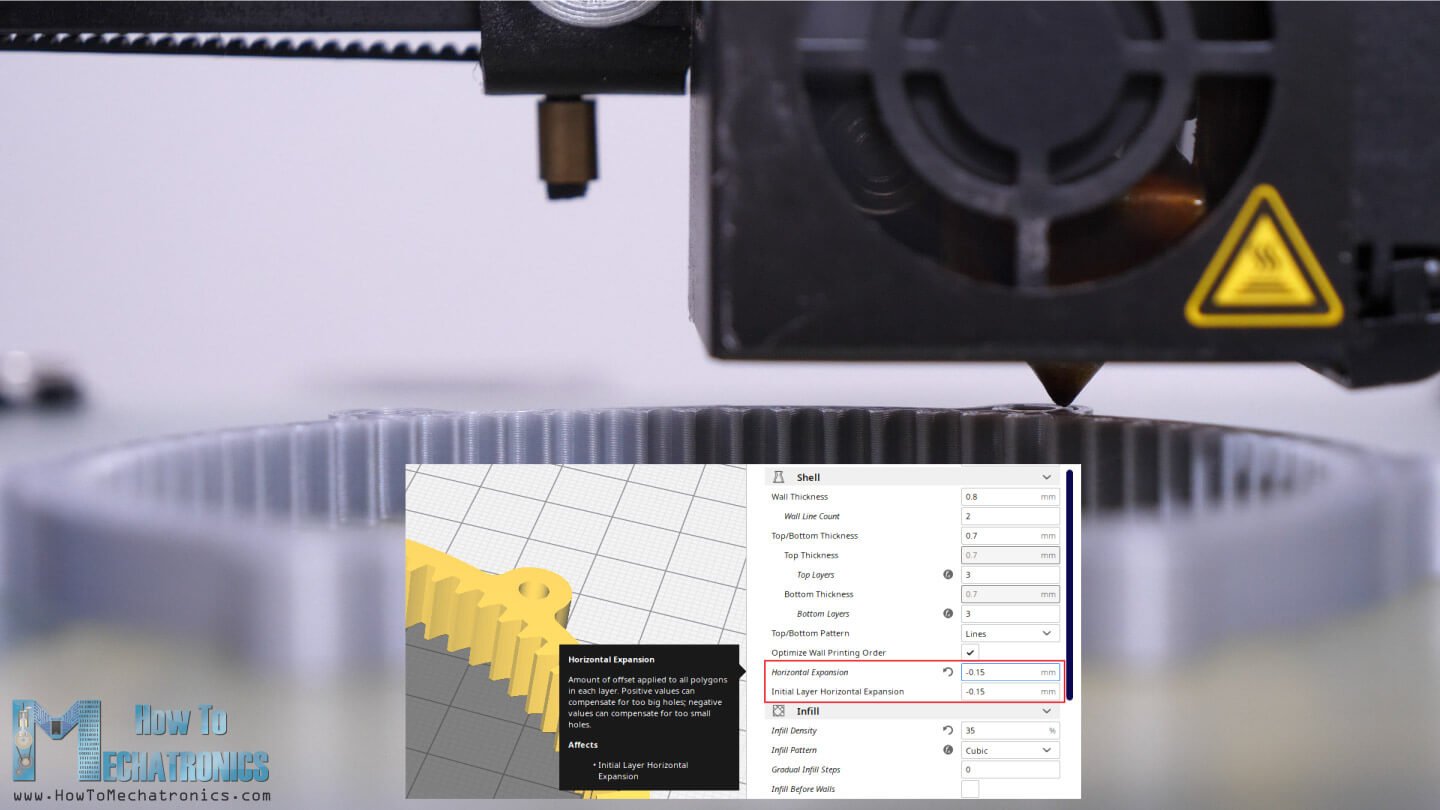
Madeni -0.15 mm'ye ayarladım ve baskılarda nispeten iyi bir doğruluk elde ettim. Bunun yazıcıdan yazıcıya değişebileceğini unutmayın. Bu özelliği kullanmazsak, baskı sırasında filamentin genişlemesi nedeniyle baskılar biraz daha büyük olur ve parçalar veya dişliler düzgün bir şekilde birbirine geçemez. Benim yazıcım Creality CR-10 3D 'dir. Parçaların hepsini yazdırmak için iyi iş çıkardığını düşünüyorum. İşte tüm 3D baskılı parçalar.

Harmonik sürücünün montajını tamamlamak için sadece bazı cıvatalara, somunlara ve bazı rulmanlara ihtiyacımız var.

İşte tüm bileşenlerin tam listesi:
- Cıvatalar:
- M3x16 - 13 adet
- M3x12 - 4
- M4x12 - 6
- M4x25 - 6
- M4x30 - 6
- M4x40 - 4
- Somun:
- M3 kendinden kilitlemeli - 13
- M4 kendinden kilitlemeli - 16
- M4 - 10
- Rulmanlar:
- (OD) 16mm x (IN) 5mm x (W) 5mm - 10
- (OD) 47mm x (IN) 35mm x (W) 7mm - 2
- Elektronik:
- Step Motor - NEMA 17
- A4988 Step Sürücüsü
- Arduino UNO R3
- DC güç kaynağı
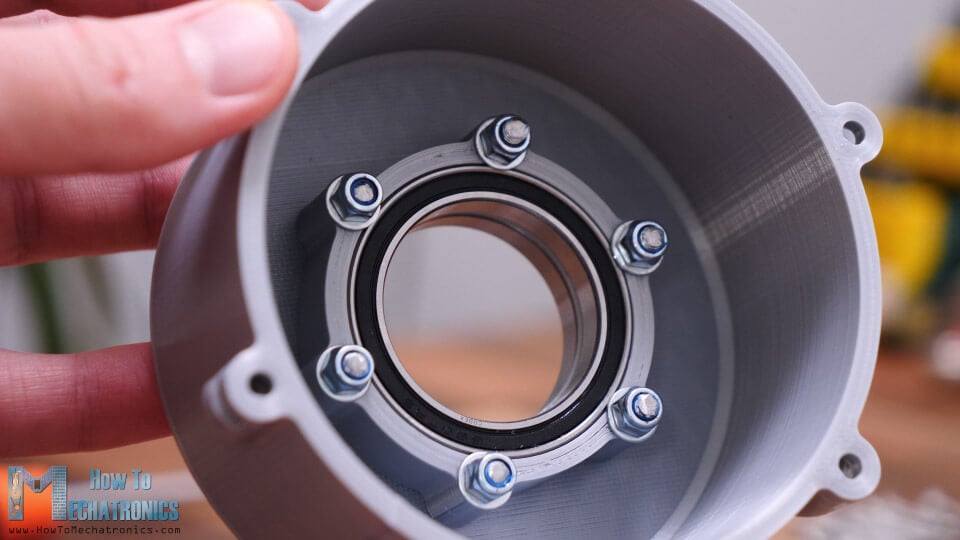
Monta, iki çıkış yatağını muhafazaya takarak başladı. Rulmanlar 47mm dış çap ve 35mm iç çapa sahiptir. Dediğim gibi, parçaları dilimlerken -0.15mm Yatay Genişleme telafisini kullandım, böylece rulmanlar yuvaya oldukça sıkı oturdu.

İki yatak arasına 1.5mm 3D baskılı mesafe halkaları yerleştirdim. Rulmanları muhafazaya sabitlemek için 25 mm uzunluğunda altı adet M4 gömme başlı cıvataya ihtiyacımız var. Ayrıca, yatağın dış halkasına yeterince dokunacak olan M4 rondelalarını kullanacağız ve böylece yatağı muhafazaya sabitleyeceklerdir.
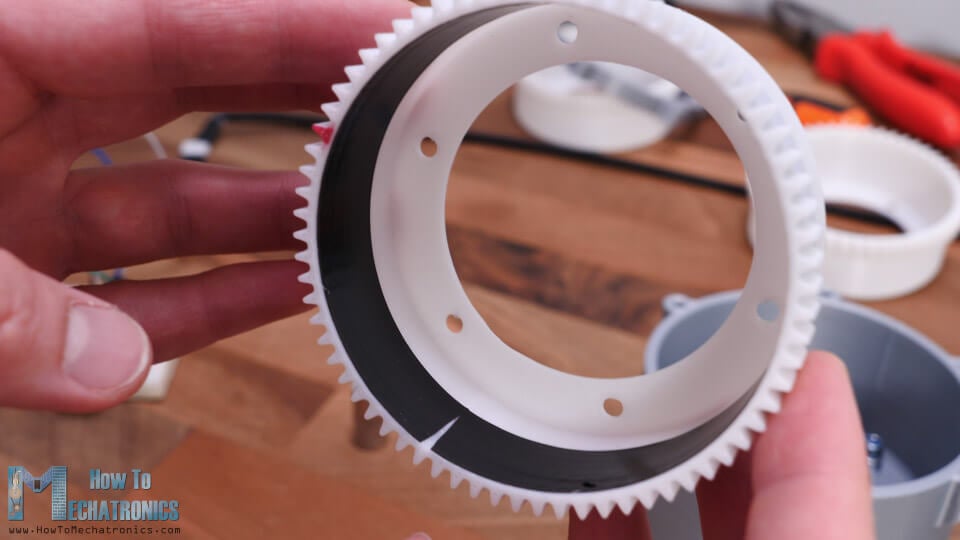
Sırada Flex spline var. Kabın duvarları sadece 1.2mm olduğundan, PLA'da basılmasına rağmen açık uçta hala esnektir.
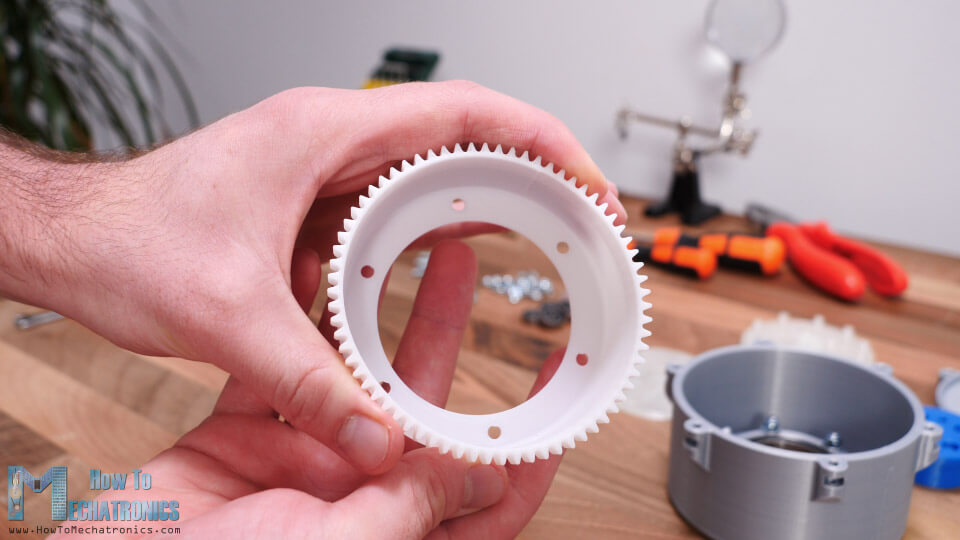
Flex spline'ın kapalı ucuna altı M4 cıvata kullanarak çıkış flanşını takabiliriz. Bir kez sabitlendiğinde, esnek spline öncekinden biraz daha az esnektir, ancak yakın uç oldukça katıdır.

Daha sonra, esnek spline'ı yatağa yerleştirmeliyiz. Çıkış flanşı ilk yatağın yarısına kadar gider. Diğer tarafta, çıkış flanşının iki yatak arasına tam olarak oturacak diğer kısmını yerleştireceğiz. Çıkış milindeki yuvalara dört M4 somun yerleştirerek devam ettim. Bu somunlar, dişli setinin çıkışına bir şeyler takmak veya bağlamak için kullanılır.
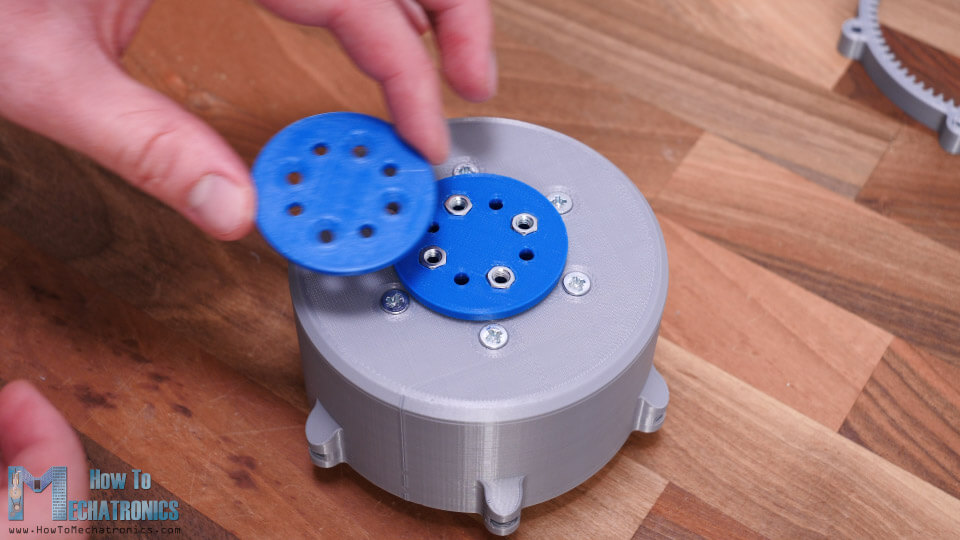
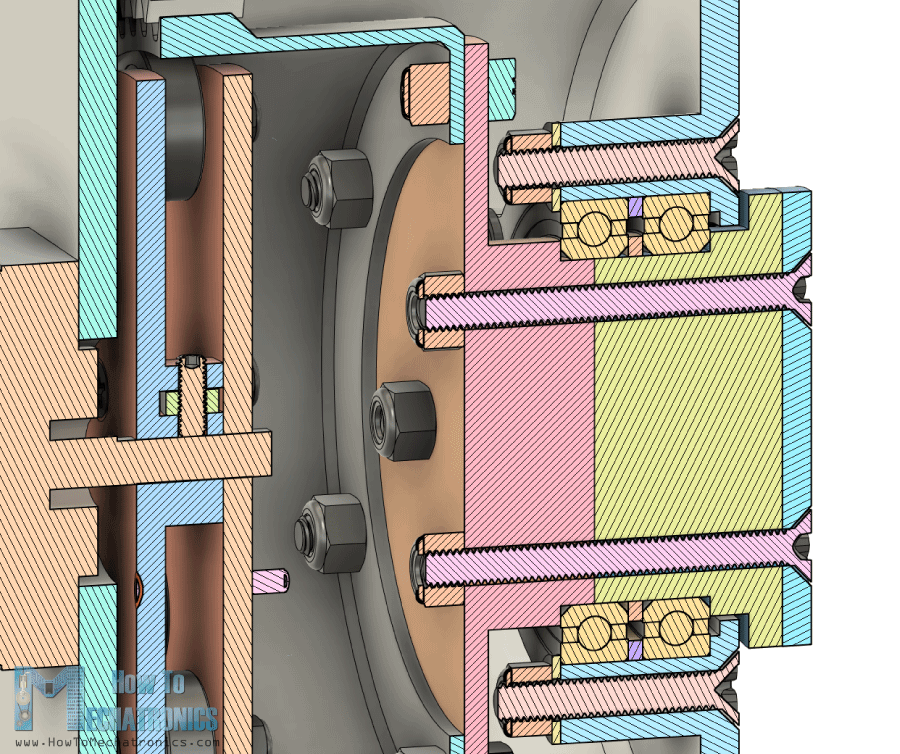
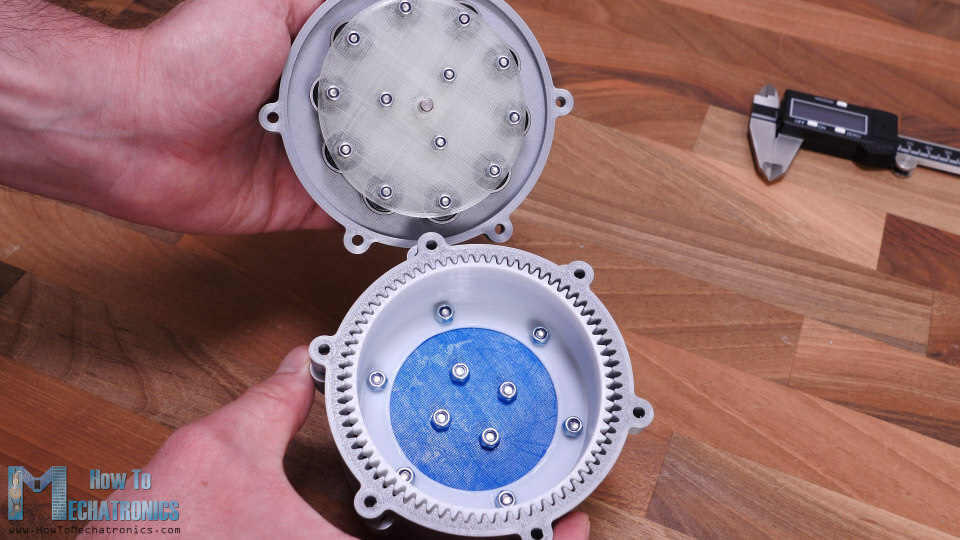
Çıkış milini bitirmek için, bunun üzerine somunları kaplayacak başka bir parça yerleştirdim ve 40mm uzunluğunda 4xM4 cıvata kullanarak sonunda iki çıkış parçasını sabitleyebildim. Şimdi, esnek spline ve çıkış mili muhafazaya sabitlenirken serbest hareket kabiliyetine sahip olabilir. Tamam, bundan sonra dişli seti kapağı ve motor montajı ile birlikte gövdeye sabitlenecek dairesel yivimiz var. Ama bunu yapmadan önce, dalga jeneratörünü monte etmemiz gerekiyor. Burada önce iki M3 somunu takmamız gerekiyor. Bu somunlar iki jeneratör vidası kullanarak dalga jeneratörünün motor şaftına sabitlenmesine hizmet edecektir.
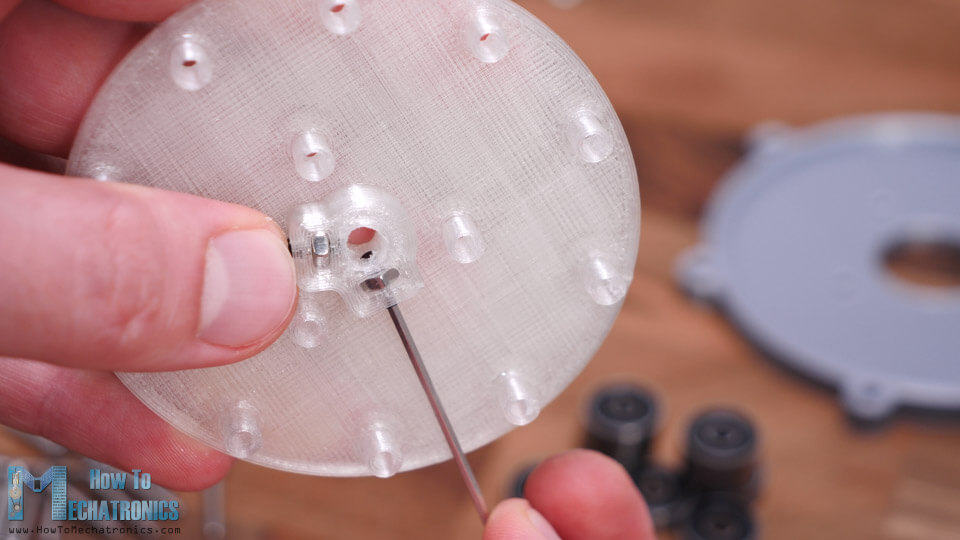
Ardından, 10 rulmanı yerleştirmeye başlayabiliriz. Burada, şaftların altındaki küçük kenar ile yatakların duvardan nasıl biraz uzak olduğunu fark edebiliriz. Dalga jeneratörünün diğer kısmı da böyle kenarlara sahiptir, böylece rulmanlar duvara değmez. Rulmanları ve aslında tüm dalga jeneratörünü 16mm uzunluğunda M3 cıvataları ve bazı somunları ile sabitleyeceğiz.

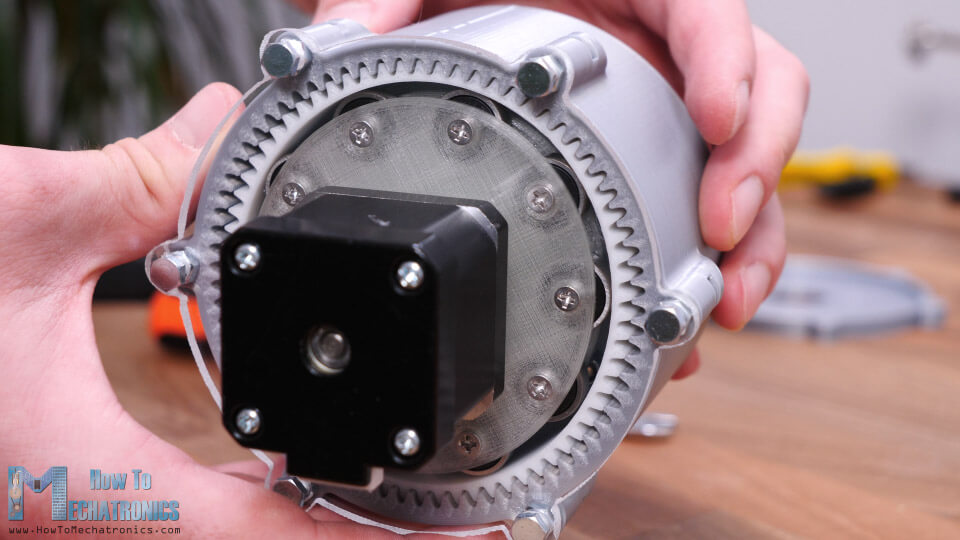
Ardından, dalga jeneratörünü motora sabitlememiz gerekiyor, ancak bunu yapmadan önce, motoru motor yuvasına ve dişli setinin kapağına takmamız gerekiyor. Dalga jeneratörü motor kapağından 2 mm uzakta olmalıdır, bu yüzden dalga jeneratörünü yerine takarken kılavuz olarak iki rondela kullandım. Daha sonra, yataklar arasında erişilebilecek şekilde konumlandırılmış başsız vidaları sıkmamız gerekir.

Son olarak, dalga jeneratörünü esnek kamaya yerleştirebilir ve her şeyi birbirine bağlayabiliriz. İlk önce dairesel yiv ile örülecek esnek yivi eliptik bir biçimde ayarlamalı ve daha sonra aynı yönde dalga üretecini yerleştirmeliyiz.
Dürüst olmak gerekirse, bunu uygun hale getirmek biraz zor olabilir, çünkü motor montajı nedeniyle esnek kama üzerinde bir kontrole sahip değiliz. Bunu biraz farklı tasarlayabilirdim ama yine de bunu göstermek için yeterince iyi olduğunu düşünüyorum. Şimdi kalan bu yuva soketlerine M4 somunları yerleştirmek ve hem dairesel yiv hem de dalga üreticiyi muhafazaya sabitlemek gerekiyor.

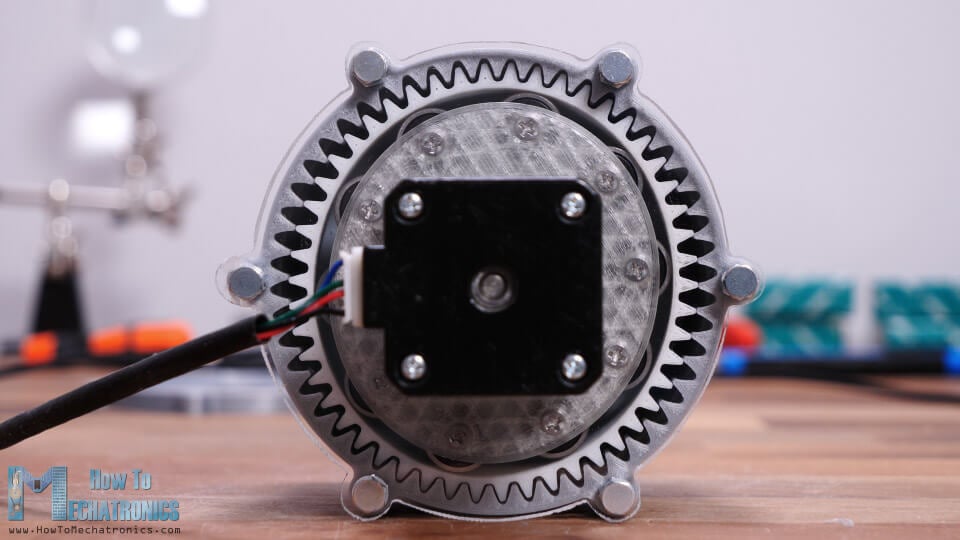
Ve Harmonic Drive'ımız artık bitti. Ama bitirdiğimde, dişli setini bu şekilde tamamlamanın biraz sıkıcı olduğunu düşündüm çünkü yavaş dönen bir çıkış mili dışında hiçbir şey göremiyoruz. Orada, 3D baskılı dişli seti kapağını akrilik olanla değiştirmeye karar verdim, böylece içeride neler olduğunu da görebiliyoruz. 4mm akrilik plakam vardı, bu yüzden kapağın şeklini işaretledim ve bir el testeresi kullanarak şekli kabaca kestim.

Sonra bir törpü kullanarak, akrilik şeklini ayarladım. 3mm matkap ucu ve 25mm Forstner biti olan motorun büyük deliği ile delikler açtım. Sonunda şekil oldukça iyi çıktı. Motoru ve dalga jeneratörünü daha önce gösterildiği gibi tekrar monte ettim. Burada, kapağa daha önce olduğu gibi uygun mesafeyi elde etmek için akrilik ve gövde arasına biraz somun ekledim. Şimdi bu dişli seti çok daha havalı görünüyor.
Step motorunu bir Arduino'ya bağladım, böylece sistemin daha iyi incelenmesi ve nasıl çalıştığını görmek için motor hızını ve yönünü kontrol edebilirim. Artık Harmonic Drive'ın gerçek hayatta nasıl çalıştığını görebiliyoruz. Bu durumda, çıkış mili giriş milinden 35 kat daha yavaştır. 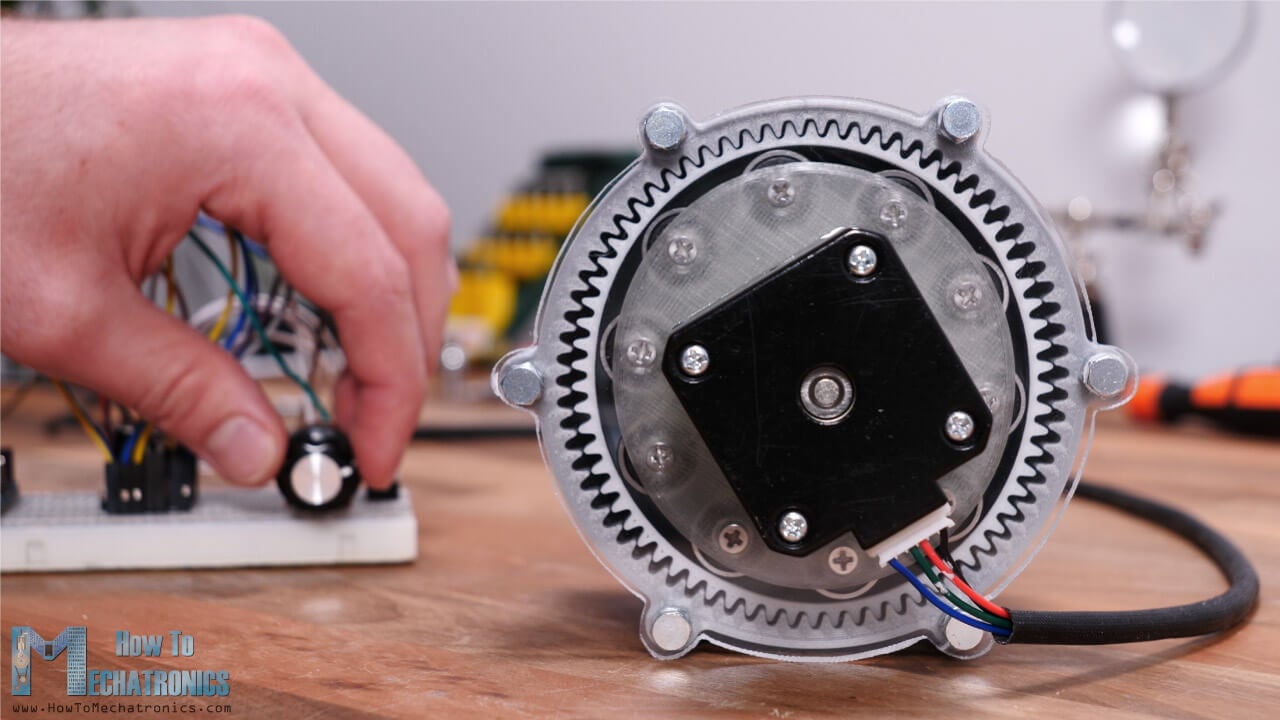
Burada flex spline'ın bir dişini kırmızı renkle işaretledim, böylece daha iyi izleyebilir ve flex spline'ın hareketini anlayabiliriz. Dürüst olmak gerekirse, bu şeyin nasıl çalıştığını görmek oldukça eğlenceli. Bununla birlikte, esnek spline'ın bazen titrediğini veya hareketin o kadar düzgün olmadığını fark ediyoruz. Bunun birkaç nedeni var. Bu yapılandırmada, sorun akrilik motor montajını elle yapmam, böylece motor merkeze mükemmel şekilde monte edilemedi. Orijinal 3D baskılı motor yuvasını kullanırken, hareket çok daha yumuşaktır. Harmonik sürüşümüzün sıfır boşluklu olmaktan çok uzak olduğunu da fark edebiliriz. Bunun nedeni, daha önce de söylediğim gibi, bu tip 3D yazıcıların sınırlamaları ve ne kadar iyi baskı yapabildikleri ile orantılı. Sadece diş profilinin ne kadar iyi basılabileceği değil, aynı zamanda genel boyutların ne kadar doğru olduğu. Örneğin, burada spline'ın içinde sadece 0.18mm olan bir yalıtım bandı kullandım ve onunla daha iyi sonuçlar aldım.
Yani, sanırım, daha iyi sonuçlar almak için baskıları test etmek ve değiştirmek gerekiyor. Ayrıca 1.75'lik bir modülle dişlileri yazdırmaya çalıştım, ancak iyi sonuçlar alamadım.
Aslında, orijinal 3D baskılı kapağı kullanırken, hareket daha yumuşaktı ama yine de yeterince iyi değildi. Ben de biraz ağırlık kaldırmayı denedim. 25cm mesafede 1.25kg kaldırabildi. Bu, yaklaşık 3Nm'lik bir torktur, bu da bu NEMA 17 step motorundan 10 kat daha fazla güç demektir.

Bu dişli sisteminin robotik uygulamalar için çok kullanışlı olan içi boş şaft için kolayca tasarlanabileceğini de eklemeliyim.