Manuel
Bu mod için sadece arayüzdeki kolu(fare) hareket ettirmeniz gerekir ve robot arayüzün imlecini takip eder, bunu harika bir platform olan Processing programlamada yapabilirsiniz.
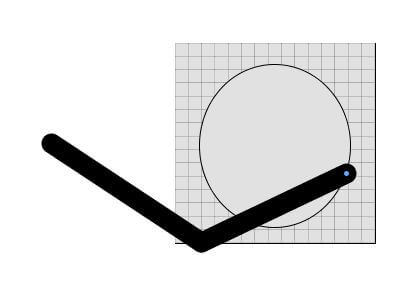
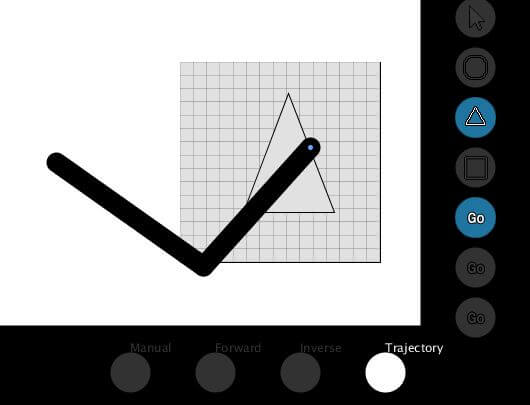
Yörüngeler
Bu model için ters kinematik kaynaklarını kullanırız ve istemciden şu şekilde rakamlar talep ederiz: Düz Çizgi, Kare, üçgen, Daire, Rakamlar, arayüzde istediğiniz şekiller çizilebilir. Yörünge, şekillerdeki her bir çizginin her bir noktasını hesaplamak için ters modu kullanır, böylece arabirime girdi olarak koyduğunuz şekli çizdikten sonra oynat'ı tıklattığınızda rakamları takip etmek kolaylaşır.
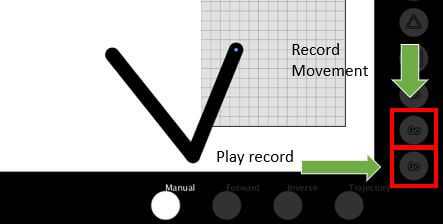
Öğrenme modu
Öğrenme modu, manuel, ileri, ters ve yörüngeler olan diğer tüm modları göz önünde bulundurur, böylece arayüzde istediğiniz herhangi bir hareketi yapabilir ve daha önce olduğu gibi aynı hareketle değiştirebilirsiniz.